苏州搬运机械手怎么选
一、搬运机械手简介:三坐标搬运机械手由钢结构架、X轴运行机构、Y轴运行机构、Z轴升降机构、抓取机械手、导电系统及控制系统等组成。二、产品特点:1.各轴方向以极高的速度直线运行,可用伺服电机快速响应;2.连续工作时间长;3.定位精度可达0.02mm;4.重型工件的码垛、上下料及工件的翻转(如果需要)的搬运;5.各机构均设有限位装置(机电双限位)、刹车装置、超载极限保护装置;6. 气动抓取机械手设有断气保护装置,防超程装置等;7.误操作保护装置。智能三坐标搬运机械手哪家生产,南京。苏州搬运机械手怎么选
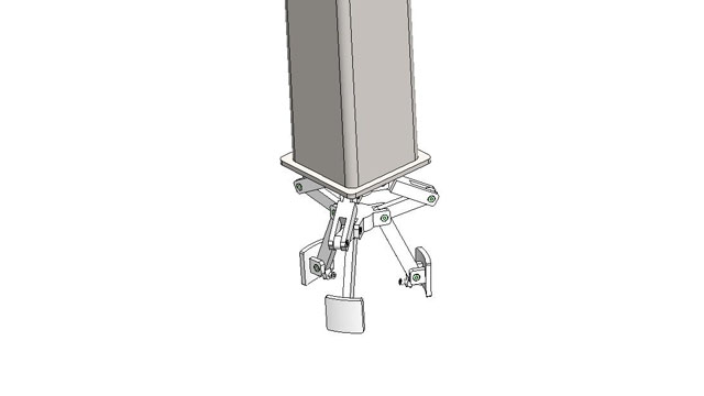
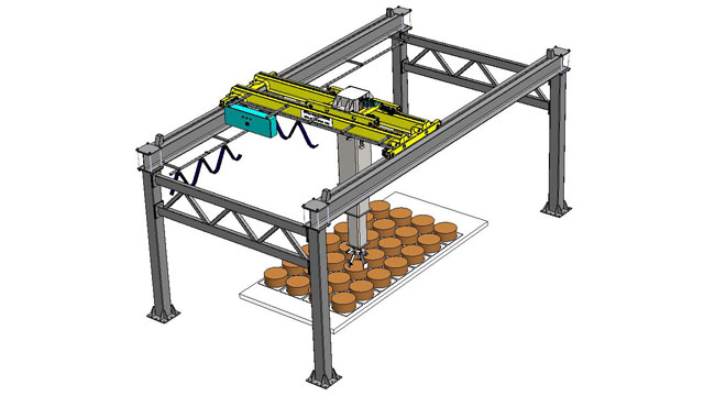
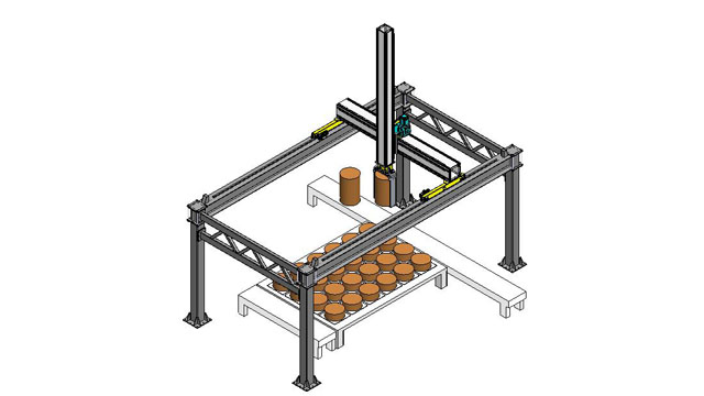
一、搬运机械手简介:三坐标搬运机械手由钢结构架、X轴运行机构、Y轴运行机构、Z轴升降机构、抓取机械手、导电系统及控制系统等组成。 二、产品特点:1.各轴方向以极高的速度直线运行,可用伺服电机快速响应; 2.连续工作时间长;3.定位精度可达0.02mm;4.重型工件的码垛、上下料及工件的翻转(如果需要)的搬运;5.各机构均设有限位装置(机电双限位)、刹车装置、超载极限保护装置;6.气动抓取机械手设有断气保护装置,防超程装置等;7.误操作保护装置。三、搬运机械手产品构成:三坐标搬运机械手由钢结构架、X轴运行机构、Y轴运行机构、Z轴升降机构、抓取机械手、导电系统及控制系统等组成;X轴方向运行机构,采用齿轮细条传动,传感器检测元件+机械限位;Z轴方向运行机构,采用全封闭减速电机角型轮传动+齿轮齿条传动,传感器检测元件+机械限位;Y轴方向升降机构,采用带式传动,传感器检测元件+机械限位;气动抓取机械手,采用双爪气动动力装置,实现机械手的开闭,爪指采用内爪式,传感器检测元件+机械限位;控制系统,通过PLC全自动控制,采集各传感器或按钮的输入信号,发送指令给个执行元件按既定动作去执行。普陀区搬运机械手报价搬运机械手,哪家生产,南京高锐特起重机有限公司。
一、搬运机械手简介:三坐标搬运机械手由钢结构架、X轴运行机构、Y轴运行机构、Z轴升降机构、抓取机械手、导电系统及控制系统等组成。 二、产品特点:1.各轴方向以极高的速度直线运行,可用伺服电机快速响应;2.连续工作时间长;3.定位精度可达0.02mm;4.重型工件的码垛、上下料及工件的翻转(如果需要)的搬运;5.各机构均设有限位装置(机电双限位)、刹车装置、超载极限保护装置;6.气动抓取机械手设有断气保护装置,防超程装置等;7.误操作保护装置。 三、搬运机械手产品构成:三坐标搬运机械手由钢结构架、 X轴运行机构、Y轴运行机构、Z轴升降机构、抓取机械手、导电系统及控制系统等组成;X轴方向运行机构,采用齿轮细条传动,传感器检测元件+机械限位;Z轴方向运行机构,采用全封闭减速电机角型轮传动+齿轮齿条传动,传感器检测元件+机械限位;Y轴方向升降机构,采用带式传动,传感器检测元件+机械限位;气动抓取机械手,采用双爪气动动力装置,实现机械手的开闭,爪指采用内爪式,传感器检测元件+机械限位;控制系统,通过PLC全自动控制,采集各传感器或按钮的输入信号,发送指令给个执行元件按既定动作去执行。
一、搬运机械手简介:三坐标搬运机械手由钢结构架、X轴运行机构、Y轴运行机构、Z轴升降机构、抓取机械手、导电系统及控制系统等组成。 二、产品特点:1.各轴方向以极高的速度直线运行,可用伺服电机快速响应;2.连续工作时间长;3.定位精度可达0.02mm; 4.重型工件的码垛、上下料及工件的翻转(如果需要)的搬运; 5.各机构均设有限位装置(机电双限位)、刹车装置、超载极限保护装置;6.气动抓取机械手设有断气保护装置,防超程装置等;7.误操作保护装置。三、搬运机械手产品构成:三坐标搬运机械手由钢结构架、X轴运行机构、Y轴运行机构、Z轴升降机构、抓取机械手、导电系统及控制系统等组成;X轴方向运行机构,采用齿轮细条传动,传感器检测元件+机械限位;Z轴方向运行机构,采用全封闭减速电机角型轮传动+齿轮齿条传动,传感器检测元件+机械限位;Y轴方向升降机构,采用带式传动,传感器检测元件+机械限位;气动抓取机械手,采用双爪气动动力装置,实现机械手的开闭,爪指采用内爪式,传感器检测元件+机械限位;控制系统,通过PLC全自动控制,采集各传感器或按钮的输入信号,发送指令给个执行元件按既定动作去执行。三坐标搬运机械手生产厂家,南京。
一、搬运机械手简介:三坐标搬运机械手由钢结构架、X轴运行机构、Y轴运行机构、Z轴升降机构、抓取机械手、导电系统及控制系统等组成。 二、产品特点:1.各轴方向以极高的速度直线运行,可用伺服电机快速响应;2.连续工作时间长; 3.定位精度可达0.02mm; 4.重型工件的码垛、上下料及工件的翻转(如果需要)的搬运;5.各机构均设有限位装置(机电双限位)、刹车装置、超载极限保护装置;6.气动抓取机械手设有断气保护装置,防超程装置等;7.误操作保护装置。三、搬运机械手产品构成:三坐标搬运机械手由钢结构架、X轴运行机构、Y轴运行机构、Z轴升降机构、抓取机械手、导电系统及控制系统等组成;X轴方向运行机构,采用齿轮细条传动,传感器检测元件+机械限位;Z轴方向运行机构,采用全封闭减速电机角型轮传动+齿轮齿条传动,传感器检测元件+机械限位;Y轴方向升降机构,采用带式传动,传感器检测元件+机械限位;气动抓取机械手,采用双爪气动动力装置,实现机械手的开闭,爪指采用内爪式,传感器检测元件+机械限位;控制系统,通过PLC全自动控制,采集各传感器或按钮的输入信号,发送指令给个执行元件按既定动作去执行。智能三坐标搬运机械手哪家生产,南京高锐特有限公司。普陀区搬运机械手报价
南京搬运机械手,南京高锐特有限公司。苏州搬运机械手怎么选
一、搬运机械手简介:三坐标搬运机械手由钢结构架、X轴运行机构、Y轴运行机构、 Z轴升降机构、抓取机械手、导电系统及控制系统等组成。二、产品特点:1.各轴方向以极高的速度直线运行,可用伺服电机快速响应;2.连续工作时间长;3.定位精度可达0.02mm;4.重型工件的码垛、上下料及工件的翻转(如果需要)的搬运;5.各机构均设有限位装置(机电双限位)、刹车装置、超载极限保护装置;6.气动抓取机械手设有断气保护装置,防超程装置等;7.误操作保护装置。苏州搬运机械手怎么选
本文来自亚博全站信誉-亚博全站手机网页版:http://www.gsyywater.com/Article/97e499606.html

上海专业塑料桶型号
塑料桶的开口方式对其密封性能有很大的影响。以下是几种不同的开口方式及其对密封性能的影响:1.滚边式开口:滚边式开口是指在塑料桶的边缘处向内滚边,形成一个较宽的口。这种开口方式可以提高塑料桶的刚度和耐用 。
把原来的字磨掉)\IC激光烧面\IC盖面\IC洗脚\IC镀脚\IC整脚\有铅改无铅处理,编带为一体的加工型的服务企业等;是集IC去字、IC打字、IC盖面、IC喷油、镭射雕刻、电子元器件、电路芯片、手机 。
和设计规格污水处理水处理沉砂池沉砂2013-10-24[环保工程施工]污水处理需要的资料污水图纸,跟的发家分享污水处理水处理2013-09-18[水处理]关于污水处理的问题在工程上水处理中,关于污水提 。
变压器,变压器容量是指变压器所能承受的电负荷的大小,通常用单位VA伏安)或KVA千伏安)表示。变压器功率是指在一定电压下,变压器向外输出的电能时的效率大小,通常用单位瓦W)或千瓦kW)表示。变压器容量 。
运动器材加工,涉及到机械、电子、塑料等多个领域,为满足各类运动项目的需求,设计师们需不断研发创新,为运动员们提供安全可靠的运动设备。运动器材加工过程包括设计、选材、模具制作、成型、装配、检测等环节。设 。
在VCM音圈马达蚀刻技术中,材料选择和参数优化对于提高音圈马达性能和功能非常重要。以下是一些常见的材料选择和参数优化方面:1. 材料选择:磁性材料:用于制作音圈马达的磁极,通常选择具有高磁导率和较低矫 。
画册印刷如何避免色差情况发生?一定要做好前期的规划设计,包括色彩的控制,检查文件文字是否是四色文字,尺寸的大小是否符合比例,如果是客户要求,就可以不更改,怕套色不准,只有控制得好,才能提升画册的的档次 。
如何选择路由器? 选择路由器时需要考虑多个因素,包括覆盖范围、带宽、稳定性、安全性和价格。此外,还需要考虑路由器的硬件配置、支持的连接数量以及路由器的操作系统等因素。路由器的设置 设置路由器需要一些技 。
油缸是工程机械主要部件,传统的加工方法是:拉削缸体——精镗缸体——磨削缸体。滚压后,表面粗糙度值的减小,可提高配合性质。从而提高了缸筒内壁的耐磨性,同时避免了因磨削引起的烧伤。通过滚压成型,滚压表面形 。
如果扁钢的宽度和厚度不能根据需要进行调整,可能会导致零部件的尺寸不准确,影响产品的装配和使用。而通过灵活调整扁钢的宽度和厚度,可以确保零部件的尺寸准确,提高产品的质量和精度。扁钢的宽度和厚度的灵活调整 。
干粉给料系统的结构与组成:干粉给料系统主要由料仓、配料装置、空气除尘设备和控制系统等组成。料仓是用于存储物料的容器,配料装置包括给料器和计量器等部件,空气除尘设备可以抽取料仓内的粉尘,控制系统用于监控 。